Red Hat OpenShift Service Mesh 3.1이 릴리스되었으며 Red Hat OpenShift Container Platform과 Red Hat OpenShift Platform Plus에 포함되어 있습니다. Istio, Envoy, Kiali 프로젝트를 기반으로 하는 이 릴리스는 Istio 버전을1.26으로, Kiali를2.11로 업데이트하며, OpenShift Container Platform 4.16 이상에서 지원됩니다.
이는Red Hat OpenShift Service Mesh 3.0에 이은 첫 번째 마이너 릴리스로,OpenShift Service Mesh를 커뮤니티 Istio 프로젝트와 통합하고Sail 오퍼레이터를사용한 설치 및 관리를 위한 메이저 업데이트입니다. 이러한 변경을 통해 OpenShift Service Mesh는 Red Hat 지원을 통해 안정적인 최신 Istio 기능을 제공할 수 있습니다.
OpenShift Service Mesh 3.1로 업그레이드
OpenShift Service Mesh 2.6 또는 이전 릴리스를 실행 중인 경우 3.1로 업그레이드하기 전에 OpenShift Service Mesh 3.0으로 업그레이드해야 합니다. 버전 2.6은 2026년 3월 12일에 지원 종료되므로 OpenShift Service Mesh 3.0으로 즉시 마이그레이션하는 것이 좋습니다. 자세한 마이그레이션 가이드는OpenShift Service Mesh 3.0 설명서에서 제공되며,OpenShift Service Mesh 2.6과 3.0의 차이점에 대한 분석도 포함되어 있습니다.
또한 최근에는 OpenShift Service Mesh 2.6과 3.0 간 마이그레이션을 위해 Kiali 콘솔을 사용하는 방법을 설명하는 문서를 게시했습니다.
전체 구성된 메트릭과 Kiali 콘솔을 사용하여 OpenShift Service Mesh 3.0이 작동하는 예시는 이솔루션 패턴 을참조하십시오.
OCP 4.19+의 Kubernetes 게이트웨이 API 지원
쿠버네티스 게이트웨이 API는 차세대 쿠버네티스 인그레스, 로드 밸런서, 서비스 메쉬 API입니다. Istio는 Kubernetes Gateway API를 서비스 메쉬를 사용하여 트래픽을 생성하고 관리하기 위한 기본 API 세트로 만들 계획입니다. 또한 Kubernetes Gateway API는 Istio의 앰비언트 모드를 사용하는 데 필요합니다. 참고로, VirtualService, DestinationRule 등의 안정적인 Istio API를 제거할 계획은 없습니다. Kubernetes 게이트웨이 API에 아직 추가되지 않은 기능을 활용하기 위해 이러한 API를 사용해야 하는 경우도 있습니다.
OpenShift Service Mesh 3.0에는 쿠버네티스 게이트웨이 API에 대한 지원이 포함되어 있지만, 이 기능을 활용하려면 사용자가 지원되지 않는 사용자 지정 리소스 정의(CRD)를 설치해야 했습니다. 이는 OpenShift Container Platform 4.19 이상에서 변경되었으며 이제 OpenShift에서 기본적으로 필요한 CRD를 사용할 수 있습니다. 더 이상 이러한 CRD를 별도로 설치할 필요가 없습니다. Red Hat은 OpenShift에 포함된 게이트웨이 API CRD를 완전하게 지원합니다.
Red Hat은 생성형 AI 워크로드 및 트래픽 패턴에 대한 최적화된 지원을 제공하기 위해 이 기능을 OpenShift Service Mesh 3.1로 백포트하여 Gateway API Inference Extension에 대한 기술 프리뷰 지원을 포함했습니다.
일반 공급되는 x86 클러스터에 대한 듀얼 스택 지원
이 릴리스는 x86 하드웨어를 실행하는 OpenShift 클러스터에서 OpenShift Service Mesh를 통한 듀얼 스택 IPv4 및 IPv6 워크로드 지원을 일반 공급합니다. OpenShift Service Mesh에서 듀얼 스택 지원을 활성화하려면 Istio 사용자 정의 리소스에서 ISTIO_DUAL_STACK 플래그를 true로 설정해야 합니다. 이는듀얼 스택에 대한 업스트림 세일-오퍼레이터 설명서와커뮤니티 Istio 듀얼 스택 설명서에서 확인할 수 있습니다.
UBI Micro 컨테이너로 이동
이 릴리스에서는 UBI Micro 기본 이미지를 사용하도록 키 istiod 및 프록시(Enovy) 컨테이너를 포함한 대부분의 컨테이너를 이동합니다. UBI Micro는 Red Hat Enterprise Linux의 가능한 가장 작은 UBI(Universal Base Image) 이미지로, 일반적으로 컨테이너 이미지에 포함되는 패키지 관리자 및 해당 종속성을 모두 제외하여 가져옵니다. UBI Micro를 도입하면 OpenShift Service Mesh의 일부로 제공되는 컨테이너 이미지의 공격 표면을 최소화하는 데 도움이 됩니다.
사이드카리스(sidecar-less) 서비스 메쉬를 향하여: Istio의 앰비언트 모드
OpenShift Service Mesh 3.1은 Istio 1.26을 기반으로 하며, Istio 1.24를 기반으로 한 OpenShift Service Mesh 3.0에 비해 대부분 증분 업데이트를 포함합니다. Istio 커뮤니티와 Red Hat이 차세대 서비스 메쉬 데이터 플레인인 Istio의 앰비언트 모드에 집중하고 있기 때문입니다.
지난 몇 년 동안 서비스 메쉬 사용량이 꾸준히 증가했습니다. 하지만 사이드카 프록시의 필요성은 각 애플리케이션 컨테이너 옆에 사이드카 컨테이너를 실행하는 데 필요한 추가 리소스(주로 메모리 및 CPU)로 인해 도입에 종종 장애가 됩니다. 이로 인해 사이드카 프록시를 포드 라이프사이클의 일부로 추가하고 업데이트해야 하므로 서비스 메쉬 도입이 복잡해집니다. 즉, 서비스 메시 업데이트를 도입하려면 애플리케이션을 다시 시작해야 합니다.
Istio의 앰비언트 모드는 사이드카 프록시의 필요성을 제거하고 Istio 데이터 플레인을 두 개의 개별 계층으로 분할하여 이러한 문제를 해결하는 것을 목표로 합니다. 이를 통해 애플리케이션 소유자의 복잡성은 줄이면서 서비스 메쉬 기능을 점진적으로 도입할 수 있습니다.
이러한 분할 아키텍처로 인해 서비스 메쉬를 활성화하기 위해 배포되는 프록시 수가 크게 줄어들어 서비스 메쉬를 실행하는 데 필요한 리소스가 크게 줄어듭니다. Istio의 앰비언트 모드에는 사이드카 프록시가 필요하지 않으므로 애플리케이션 포드를 수정하거나 다시 시작할 필요 없이 메시에서 애플리케이션을 추가하고 제거할 수 있습니다.
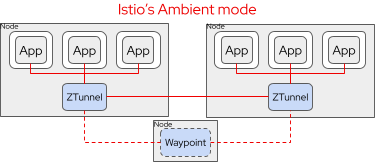
Istio의 앰비언트 모드에는 두 개의 개별 계층이 있습니다.
- Ztunnel: 애플리케이션 포드의 네트워크 네임스페이스 내에 수신 대기 소켓을 생성하여 mTLS 암호화를 통해 포드 수준 트래픽을 투명하게 업그레이드하는 경량의 계층 4 노드 수준 프록시(쿠버네티스에서 Daemonset로 실행) 또한 Ztunnel은 노드의 포드(노드의 포드만)에 대한 인증서 및 ID 관리를 처리합니다. Ztunnel만으로도 자동 mTLS 암호화, 계층 4 텔레메트리 및 정책 관리를 구현할 수 있습니다.
- Waypoint:게이트웨이와 유사한 선택적 Envoy 프록시로, 애플리케이션 수준의 보안 및 트래픽 정책, 애플리케이션 수준의 텔레메트리, 메쉬 복구 기능과 같은 레이어 7 메쉬 기능을 제공하기 위해 일련의 애플리케이션(기본적으로 네임스페이스 범위)에 배포됩니다. 사이드카와 달리 Waypoint 프록시는 필요에 따라 추가하고 애플리케이션 컨테이너와 독립적으로 확장할 수 있습니다.
Istio 앰비언트 모드 아키텍처 및 장단점에 대한 자세한 내용은 Red Hat OpenShift에서 Istio 앰비언트 모드 사용해보기를 참조하세요.
OpenShift Service Mesh 3.1은 Istio의 앰비언트 모드 상태를 Technology Preview로 업데이트합니다. 이 릴리스에 포함된 Ztunnel 프록시는 Red Hat에서 완벽하게 지원하며, FIPS용으로 설계되었고 암호화를 위해 OpenSSL을 사용합니다. OpenShift Service Mesh 3.1은 설치 가이드의 일부로 OpenShift에서 Istio의 앰비언트 모드를 시작하기 위한 설명서를 제공합니다. 이는 상용화 단계로 나아가는 몇 달 내에 구축될 예정입니다.
참고로, Istio의 앰비언트 모드에는 Kubernetes Gateway API가 필요합니다. 따라서 지원되는 Gateway API CRD가 기본적으로 설치되는 OpenShift Container Platform 4.19 이상에서 이 모드를 사용하십시오. OpenShift의 이전 릴리스에서 Istio의 앰비언트 모드를 실험하려면커뮤니티 Istio 설명서에 설명된 대로 지원되지 않는 Kubernetes 게이트웨이 API CRD를 설치해야 합니다. 참고로, OCP 4.19에서 지원되는 쿠버네티스 게이트웨이 API CRD로 업그레이드하면 다운타임이 발생할 수 있습니다.
또한 OpenShift Service Mesh가 아직 설치되지 않은 클러스터에서 Istio 앰비언트 모드를 실험하여 기존 서비스 메쉬 배포를 방해할 가능성을 줄이는 것이 좋습니다. 앞으로는 사이드카 모드 데이터 플레인과 함께 앰비언트 모드 데이터 플레인을 실행하는 방법에 대한 설명서와 사이드카 모드에서 앰비언트 모드로 애플리케이션을 마이그레이션하는 방법에 대한 지침을 제공할 예정입니다.
Istio 1.26부터모든 사이드카 모드 기능이 앰비언트 모드에서 지원되는 것은 아니며일부 기능은 업스트림 Istio 에서 '알파' 상태로 유지됩니다. 앰비언트 모드는 모든 서비스 메시 활용 사례에 적합하지 않을 수 있습니다. 가장 눈에 띄는 격차는 다중 네트워크 다중 클러스터 설정과 앰비언트 및 사이드카 모드 데이터 플레인 간의 상호 운용성입니다. 이러한 기능은 Istio 커뮤니티에서 개발 중입니다.
Kiali 업데이트
Kiali는 OpenShift Service Mesh에 포함된 Istio 서비스 메시용 콘솔입니다. 이 릴리스에서는 많은 업데이트 및 개선 사항(예: Istio의 앰비언트 모드)을 포함하는 2.11로 업데이트합니다.
메쉬 페이지 업데이트
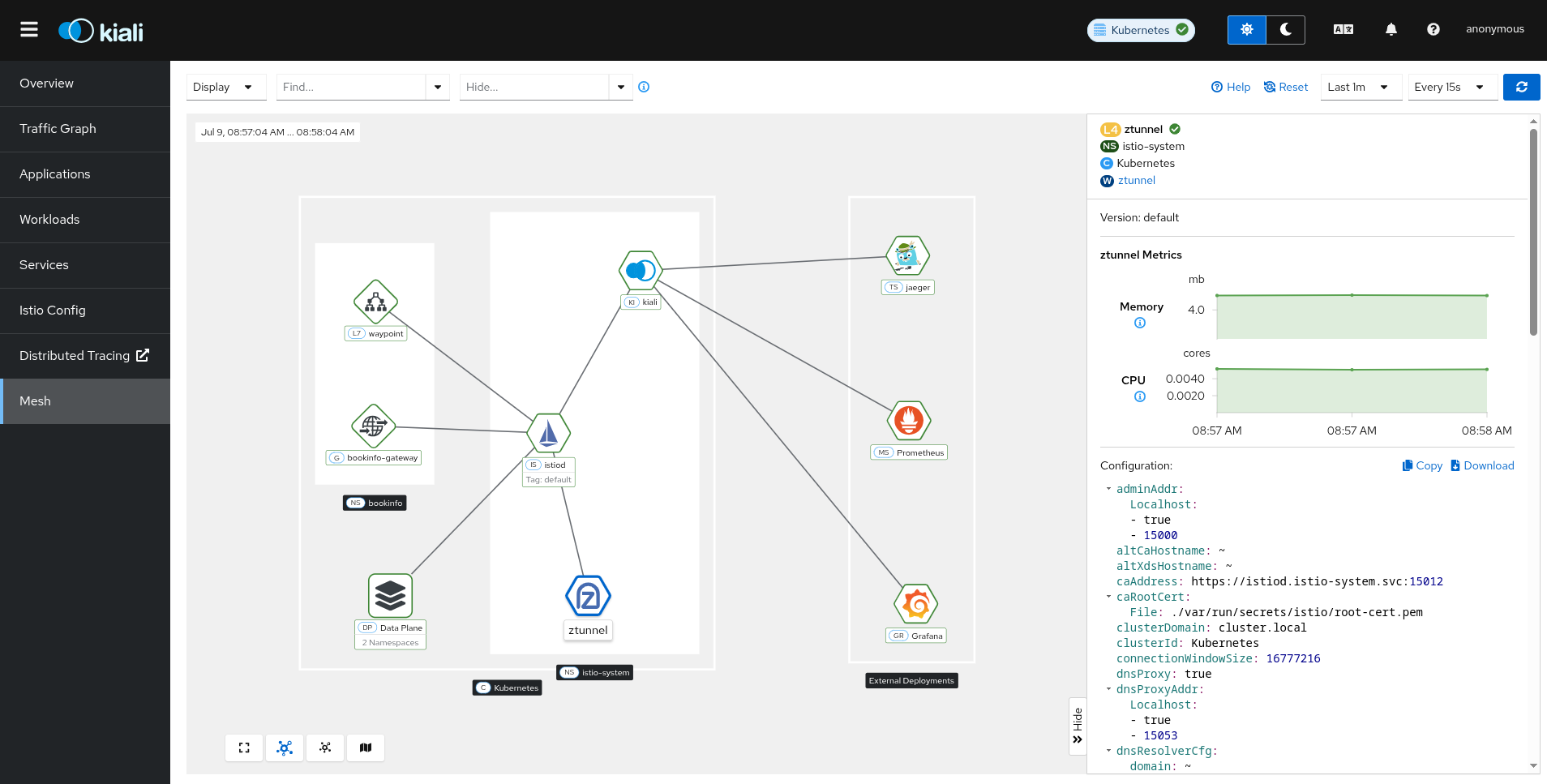
메쉬 페이지는 Istio 컨트롤 플레인 자체, 데이터 플레인 구성 요소, Prometheus, Tempo와 같은 관측성 애드온을 다루는 Istio의 인프라 상태를 모니터링하기 위한 기본 대시보드로 계속 개선됩니다. 이 릴리스는 Istio 게이트웨이 및 앰비언트 모드 데이터 플레인 구성 요소인 Ztunnel 및 Waypoint를 비롯한 여러 업데이트를 포함합니다. 메쉬 페이지에서 구성 요소를 검사하여 각 구성 요소와 관련된 지표 및 구성 덤프를 포함한 주요 상태 정보를 확인할 수 있습니다.
대규모 메쉬를 통한 성능과 확장성
Kiali의 일반적인 우려 사항은 서비스 메쉬의 워크로드 수가 증가함에 따른 성능입니다. 과거에는 Kiali가 대규모 서비스 메쉬로 인해 응답성을 유지하는 데 어려움을 겪었을 것입니다. 이제 Kiali 프로젝트 FAQ는 대규모 메쉬 배포에서 Kiali를 사용하기 위한 지침을 제공하는 성능에 관한 새로운 섹션을 포함합니다. 이 릴리스는 대규모 메쉬를 더 효과적으로 관리하기 위한 업데이트를 포함하여 성능을 개선하기 위한 업데이트를 포함합니다.
예를 들어, 기본적으로 Kiali는 즉시 페이지 렌더링을 시도하고 새로 고침 간격 드롭다운의 설정에 따라 대부분의 페이지를 자동으로 업데이트합니다. 매우 큰 메쉬의 경우 초기 렌더링 속도가 느려서 콘솔 사용이 지연될 수 있습니다. 이제 Kiali는새로 고침버튼을 수동으로 클릭할 때만 페이지를 업데이트하는수동새로 고침 설정을 제공합니다. 이는 Kiali 사용자 지정 리소스 정의(CRD)의spec.kiali_feature_flags.ui_defaults.refresh_interval: 수동으로 설정할 수 있습니다.
이제 검증을 비활성화하여 대규모 메쉬의 성능과 응답성을 개선할 수도 있습니다. Kiali 오퍼레이터 구성spec.external_services.istio.validation_reconcile_interval 을 0 으로설정하여 이 작업을 수행할 수 있습니다.
OpenShift Service Mesh 시작하기
OpenShift Service Mesh를처음 사용하는 경우OpenShift Service Mesh 소개와 Day 1 설치 지침으로 시작하세요. 전체 작업 예시는 OpenShift Service Mesh 3로 트래픽 및 관측성 최적화 솔루션 패턴을 확인하세요.
OpenShift Service Mesh 3.0을 사용 중인 경우 업그레이드 설명서에서 OpenShift Service Mesh 3 오퍼레이터, Istio 컨트롤 플레인, Istio CNI 리소스, 데이터 플레인을 구성하는 프록시를 업데이트하는 다양한 접근 방식을 검토하세요.
OpenShift Service Mesh 2.6 또는 이전 버전을 사용 중이라면OpenShift Service Mesh 2와 3의 차이점과 광범위한마이그레이션 도큐멘테이션 을검토하세요. 또한 Kiali를 사용한 절차를 설명하는 블로그 포스트도 있습니다.
제품 체험판
Red Hat OpenShift Container Platform | 제품 체험판
저자 소개

Jamie Longmuir is the product manager leading Red Hat OpenShift Service Mesh. Prior to his journey as a product manager, Jamie spent much of his career as a software developer with a focus on distributed systems and cloud infrastructure automation. Along the way, he has had stints as a field engineer and training developer working for both small startups and large enterprises.
유사한 검색 결과
과거의 운영 방식에서 벗어나 IT의 미래 구축
AI의 다음 변곡점: 에이전트를 엔터프라이즈 슈퍼유저로 전환
Collaboration In Product Security | Compiler
Keeping Track Of Vulnerabilities With CVEs | Compiler
채널별 검색

오토메이션
기술, 팀, 인프라를 위한 IT 자동화 최신 동향

인공지능
고객이 어디서나 AI 워크로드를 실행할 수 있도록 지원하는 플랫폼 업데이트

오픈 하이브리드 클라우드
하이브리드 클라우드로 더욱 유연한 미래를 구축하는 방법을 알아보세요

보안
환경과 기술 전반에 걸쳐 리스크를 감소하는 방법에 대한 최신 정보

엣지 컴퓨팅
엣지에서의 운영을 단순화하는 플랫폼 업데이트

인프라
세계적으로 인정받은 기업용 Linux 플랫폼에 대한 최신 정보

애플리케이션
복잡한 애플리케이션에 대한 솔루션 더 보기
가상화
온프레미스와 클라우드 환경에서 워크로드를 유연하게 운영하기 위한 엔터프라이즈 가상화의 미래