
数十年にわたりプロセス制御を支配してきたのは、プロプライエタリーのハードウェアやソフトウェアをベースとして深く組み込まれた専用デバイスでした。その理由は、制御システムは障害や中断を生じさせることなく、年中無休で、ダウンタイムを最小限に抑えながら稼働しなければならないからです。障害の影響は、工場の床のベタつきや機械の破損から、経済的損失、最悪の場合は人的被害に至るまで多岐にわたります。さらに、多くの工場では、更新に必要なダウンタイムのスケジュールを立てるのが難しく、更新のために使用できる時間が必要な時間よりもはるかに少ないことがよくあります。たとえば、2000 年代半ば、ドバイ港で制御ソフトウェアに小規模な更新をアップロードする必要が生じましたが、その際に業務を一時停止できる時間はわずか 30 分でした。
こうしたことから、製造システムや産業システムのイノベーションは、通信会社、データセンター、クラウドなどの業界に比べて遅れています。幸い、先進的なソフトウェアの開発、管理、自動化、セキュリティにおける進歩が業界の要件と融合し、汎用ハードウェアに新たなメリットをもたらしています。
分散制御システムの未来を定義する
産業プロセス制御のコモディティ化が到来したことで技術的進歩がもたらされ、先進的な製造業者では境界線がコンピューティングエッジにまで拡大しています。従来は、管理者が USB スティックを手に制御システムがある場所へと出向き、手作業で更新を適用する必要がありました。今では、インテル、シュナイダーエレクトリック、Red Hat の共同作業により、製造業者は、手作業の負担を軽減し、汎用ハードウェアおよび汎用オペレーティングシステム上で動作し、汎用自動化技術を使用する、ソフトウェア・デファインドでエッジ対応の産業用制御システムを活用することができます。
この 3 社は協力して、先進的で自動化されたクラウドベースのデプロイメントと同様の、より先進的なネットワークベースのエクスペリエンスを作成し、最先端の進歩を示すだけでなく次世代の分散制御システムへの道筋を明らかにする、次世代のスマートファクトリーを実証しました。
アーキテクチャを理解する
デモのコンピューティング部分は、(1) 制御ワークロードと DCN のスーパーバイザーであり、Intel Xeon クラスのプロセッサー上で安全に稼働するために必要な自動化機能とコンテンツ制御機能を提供する、アドバンスト・コンピューティング・プラットフォーム (ACP) と、(2) 制御の実行専用のノード群である分散制御ノード (DCN) の 2 つの主要な概念に分かれています。

アドバンスト・コンピューティング・プラットフォーム (ACP)
ACP は制御ワークロードと DCN のスーパーバイザーであり、利用可能な DCN にワークロードをプログラムで安全にデプロイするために必要な自動化機能とコンテンツ制御機能を提供し、さらに仮想化機能とモニタリング機能をもたらします。Red Hat Device Edge は Red Hat Ansible Automation Platform のプラットフォームとして機能し、必要に応じて DCN とそのワークロードのデプロイ、ライフサイクル、再デプロイに使用される自動化プラットフォームを提供します。次世代スマートファクトリーのデモでは、ACP は 1 つの制御ワークロードを持つ 1 つの DCN 群のみを範囲としていましたが、このアプローチを用いると、ハードウェアを追加することなく DCN の数を数千にまで増やすことができます。
分散制御ノード
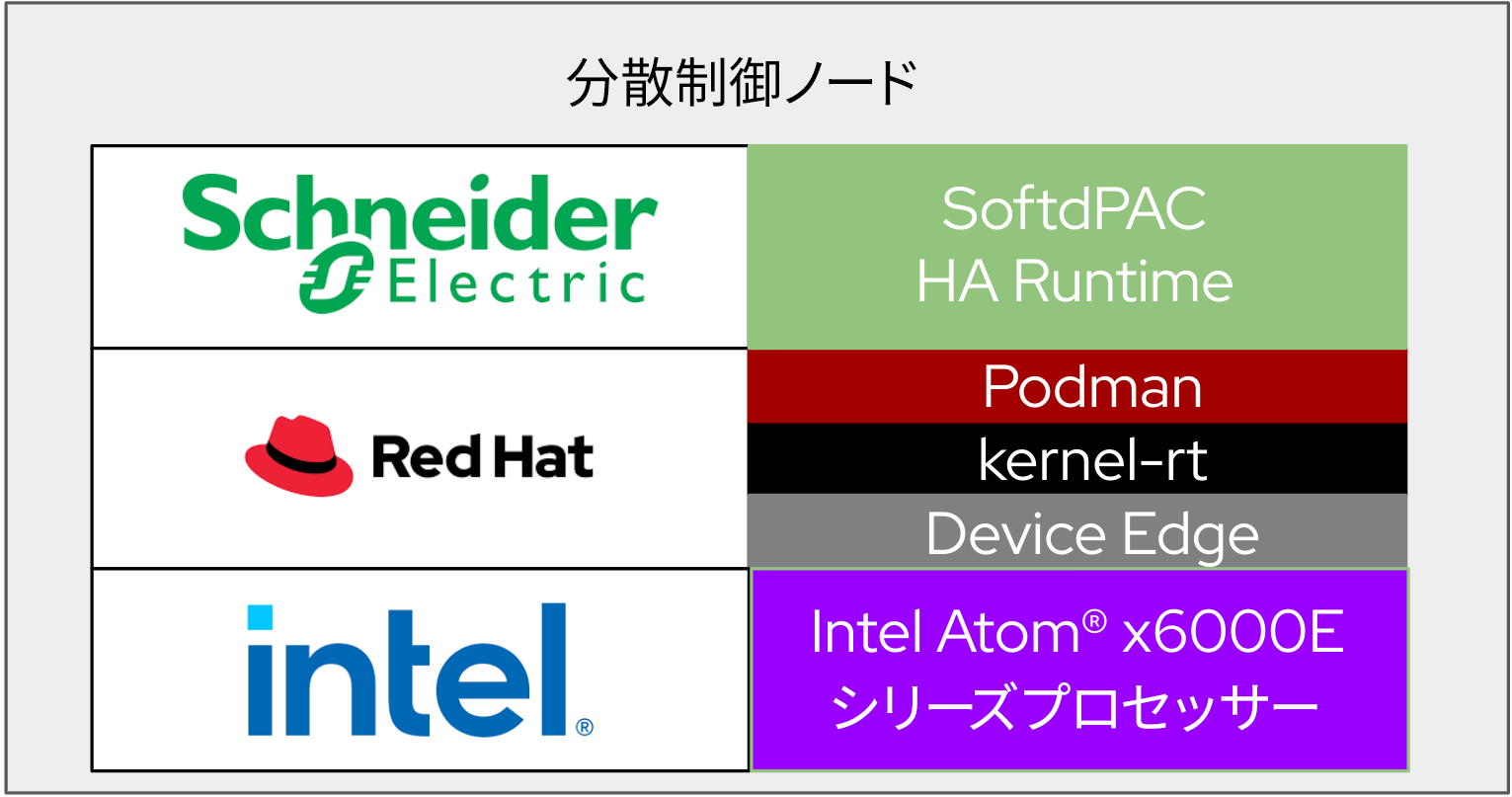
DCN は、様々な重要度が混在するワークロード向けに設計された低電力の産業用システムで、インテルをベースとしており、リアルタイムと非リアルタイムの両方のワークロードが含まれます。DCN は実際には (1) プロセッサー、RAM、システムボード、プライマリーストレージを含むコンピューティング・モジュールと、(2) 複数のネットワーキング・インタフェースと電源を提供するクレードルの 2 つの部分で構成されます。インテルプロセッサーは、キャッシュ割り当てテクノロジーや時間的制約のあるネットワーキングなど、リアルタイム・コンピューティングのための追加機能を提供します。2 つの機能は、ネットワーク上であっても、決定論的なパフォーマンスに依存する制御ワークロードの実行に不可欠です。この汎用ハードウェアは、制御ワークロードを実行するための基盤として機能します。
先述したように、Red Hat Device Edge はオペレーティングシステム層を提供しますが、これらのミッションクリティカルなワークロードをサポートするために特定の設定で提供されます。まず、オペレーティングシステムは、イメージおよびパッケージシステムとして rpm-ostree を利用するエッジデプロイメントに組み込まれます。次に、制御ワークロードは特にジッターの影響を受けやすいため、リアルタイムカーネルを利用して、より決定論的なパフォーマンスを提供します。この基盤上で、Podman を利用してコンテナ化された制御ワークロードを実行しました。
そして、シュナイダーエレクトリックは、制御ランタイムとして機能する SoftdPAC-HA を提供しました。SoftdPAC は I/O サブシステムと連携し、デモのセンサーとドライブに接続されます。SoftdPAC 制御ランタイムは、DCN のクレードル上の専用ネットワーク・インタフェースを利用してバンプレスなフェイルオーバーを促すように設計されています。また、ブートプロジェクトの構造内に制御ループが組み込まれているため、ランタイムと制御戦略を 1 つのコンテナイメージにパッケージ化し、コンテナを起動するだけで可用性の高い設定にデプロイすることができます。
自動化フレームワーク
産業オートメーションを自動化するために、Ansible は DCN を設定して制御し、必要に応じて DCN を生産的な状態に導く機能を提供しました。
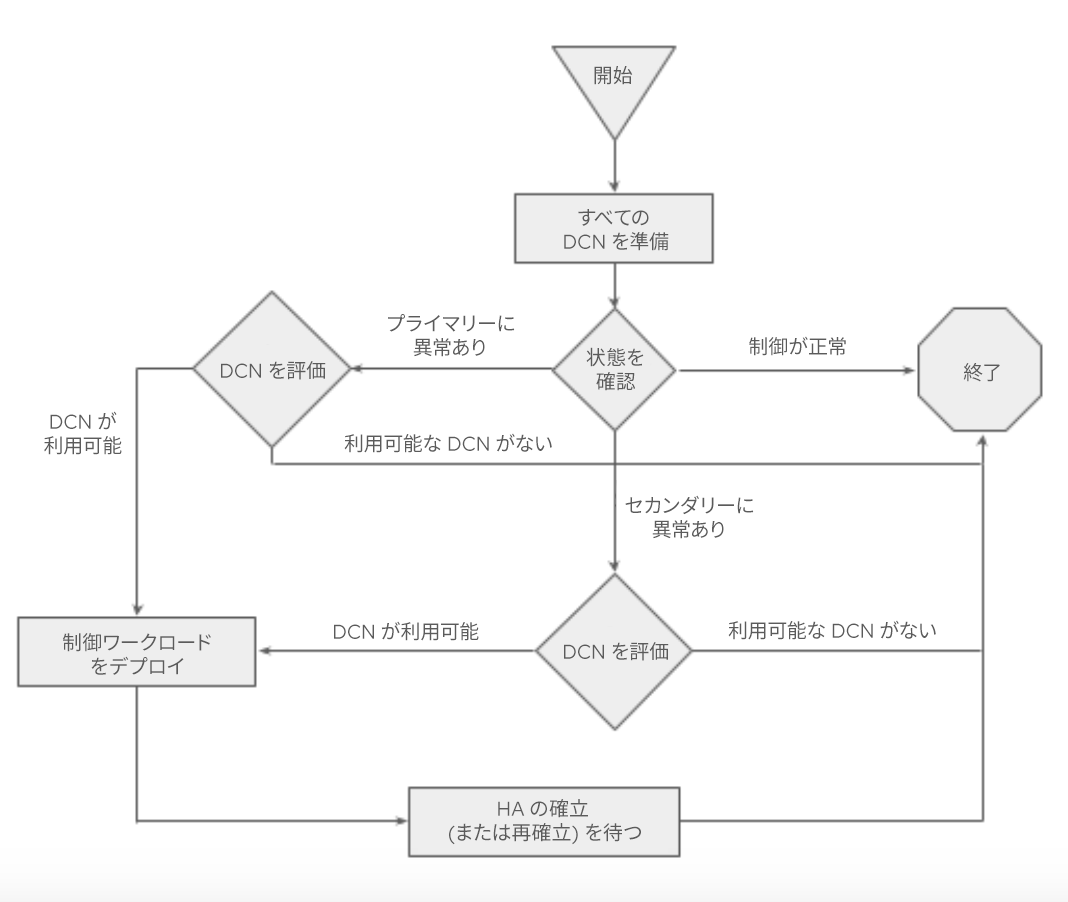
自動化はいくつかの個別の機能ブロックを配置した次のようなワークフローに分割されました。
- 制御ワークロードを実行するように DCN を準備する
- 既存のワークロードと DCN の状態に応じてプライマリー DCN とセカンダリー DCN を選択する
- 選択した DCN の役割に応じて制御ワークロードをデプロイする
- モニタリングスタックを ACP にデプロイする
これらのワークフローは、達成すべき作業の個々のブロックとして利用され、結果と決定を他のワークフローに転送することができます。したがって、1 つの親ワークフローが複数の子ワークフローを起動し、制御ランドスケープが正常で可用性の高い状態になります。システムが正常でない場合、または可用性が高い状態にない場合は、調整するために適切な修復が実行されます。
追加機能
さらに、ACP は次のような多くの追加機能を提供します。
- 制御ワークロードのコンテナイメージを格納するイメージレジストリ
- イメージを作成するための Image Builder
- モニタリングスタック
- モニタリングスタックからの情報を表示するダッシュボード
- 他の Linux 以外のワークロードのための仮想化機能
これらのサポート機能によってデモは完結し、現在の HMI ワークステーションやオペレーター・ワークステーションに似た分散制御システムの現在の状況に関する貴重な知見を提供します。
次世代の分散制御システムを実現する
インテルの汎用ハードウェアを使用するこの新しいモデルによって、シュナイダーエレクトリックは、高価なカスタム設計のハードウェアの販売に基づくビジネスモデルから、ソフトウェア、経常収益、顧客全体のエクスペリエンスの向上に重点を置いたビジネスモデルに変革することができました。この次世代スマートファクトリーのエッジ対応インフラストラクチャ、自動化、およびオーケストレーションは、私たちが毎日消費するものを最終的に製造する工場、石油精製所、製造ラインを強化するでしょう。
執筆者紹介
Josh is Red Hat’s industrial edge architect on the global edge architecture team, focused on the industrial edge. He’s worked on the floor of manufacturing plants and built industrial control systems before moving over into enterprise architecture to handle IT/OT convergence. While at Red Hat, he’s worked with large automotive companies, the oil and gas supermajors, and major manufacturing companies on their approach to next generation compute at the industrial edge.
類似検索
エージェント型のパラドックスとハイブリッド AI の事例
過去を管理するのをやめて、IT の未来を構築しましょう
Untangling Networks | Compiler
Infrastructure At The Edge | Compiler
チャンネル別に見る

自動化
テクノロジー、チームおよび環境に関する IT 自動化の最新情報

AI (人工知能)
お客様が AI ワークロードをどこでも自由に実行することを可能にするプラットフォームについてのアップデート

オープン・ハイブリッドクラウド
ハイブリッドクラウドで柔軟に未来を築く方法をご確認ください。

セキュリティ
環境やテクノロジー全体に及ぶリスクを軽減する方法に関する最新情報

エッジコンピューティング
エッジでの運用を単純化するプラットフォームのアップデート

インフラストラクチャ
世界有数のエンタープライズ向け Linux プラットフォームの最新情報

アプリケーション
アプリケーションの最も困難な課題に対する Red Hat ソリューションの詳細
仮想化
オンプレミスまたは複数クラウドでのワークロードに対応するエンタープライズ仮想化の将来についてご覧ください