The Performance and Latency Sensitive Applications (PSAP) team at Red Hat works on the enablement and optimization of Red Hat OpenShift to run compute-intensive enterprise workloads and HPC applications effectively and efficiently. As a team of Linux and performance enthusiasts who are always pushing the limits of what is possible with the latest and greatest upstream technologies, we have been experimenting with a proof-of-concept (POC) implementation of deploying scientific HPC workloads on OpenShift using the MPI Operator to test the performance.
This blog post is a follow-up to the previous blog post on running GROMACS on Red Hat OpenShift Container Platform (OCP) using the Lustre filesystem. In this post, we will show how we ran two scientific HPC workloads on a 38-node OpenShift cluster using CephFS with OpenShift Container Storage in external mode. We will share the benchmarking results of MPI Microbenchmarks, GROMACS, and SPECFEM3D Globe. We ran these workloads on OpenShift and compared them against the results from a bare-metal MPI cluster using the same hardware.
GROMACS is a package for running molecular dynamics simulations. We benchmarked with the popular "water" dataset, which simulates hundreds of thousands of water molecules. This benchmark is a part of the Phoronix benchmark suite. Typically, GROMACS with MPI scales well up to 20 nodes, but beyond that a high-speed networking technology, like the Infiniband, becomes a must.
SPECFEM3D_Globe is a geophysics application that simulates earthquakes and seismic wave propagation in the earth's crust at a continental and global scale. It's a reference benchmark for supercomputers, thanks to its good scaling capabilities.
Both SPECFEM and GROMACS are scientific workloads which support multithreading via OpenMP, and distributed-memory parallelization over multiple nodes with MPI. They also both support GPU acceleration which can be enabled in OpenShift via the NVIDIA GPU Operator, although this is out of the scope of this post.
Setup
Test Environment
The cluster we used was made up of 38 SuperMicro 5039ms machines for the OpenShift cluster and four Dell R930 machines for the Ceph cluster. We ran a provider agnostic installation of OCP 4.5.7 on physical servers (bare-metal) with one provisioning node, three masters, and 34 worker nodes. Two of the worker nodes were used to isolate infrastructure Pods. Each of the SuperMicro 5039ms OpenShift nodes were single socket systems with four real cores plus hyper threads, 2x25GbE network interfaces. One of the 25GbE was used for the OpenShift cluster, while the other was available for MPI traffic. The 10GbE interfaces were unused.
For the reference results on bare-metal, we used RHEL 8.2 and OpenMPI 4.0.2.
Ceph configuration
We chose to use CephFS for this PoC because it can be used both in OpenShift (using OpenShift Container Storage (OCS) External mode) and on bare-metal by mounting it on RHEL 8.2. OCS is software-defined storage integrated with and optimized for OCP. With OCS, it was easy to access GROMACS and SPECFEM data stored in CephFS, by mounting a ReadWriteMany PersistentVolumeClaim inside the MPIJob worker Pods.
We installed Red Hat Ceph Storage (RHCS) on the four Dell machines. In OpenShift, we access this CephFS instance using the OCS operator installed from GitHub in External Mode. The OCS external-mode feature allows on-premise OCS deployments to consume a Red Hat Ceph Storage instance external to the OpenShift cluster. This way, we were able to use the same CephFS filesystem for our bare-metal benchmarking and on OpenShift via OCS. Alternatively, OCS can create a Ceph cluster internal to an OpenShift cluster.
Note: GROMACS and SPECFEM performance was not impacted by the filesystem performance according to our tests. For this reason, we did not spend time optimizing the performance of our Ceph configuration, and won't go into details of how Ceph was installed and configured. Installation and configuration procedures for RHCS can be found in the documentation.
Running MPI applications with the MPI Operator
To install the MPI Operator, see the instructions on the Kubeflow MPI Operator GitHub repository. For the benchmarking we've done, we used version 0.2.3 of the MPI Operator because of a known bug in the latest upstream which causes MPIJobs to fail to run on OpenShift.
The MPI Operator defines the MPIJob CustomResource. To run GROMACS, SPECFEM3D Globe, and the microbenchmarks, we create MPIJob instances to be managed by the MPI Operator using a YAML manifest. The MPIJob manifest specifies the mpirun command, the number of launcher pods in which to run the mpirun command (usually one), the number of worker Pods, and the number of MPI slots per worker pod. When an MPIJob object is created, the MPI Operator creates the launcher and worker Pods and runs the specified mpirun command.
An example MPIJob for running GROMACS can be found here. SPECFEM MPIJob template can be found here.
Using Multus with the MPI Operator
One of the things which we will get into in the performance results is bypassing the software-defined overlay network (SDN) in OpenShift. For certain types of network traffic, the SDN can have some performance overhead due to encapsulation and OpenFlow rules. In general, throughput is not diminished but latency can be affected. Besides, the SDN is shared with all OpenShift Pods, which introduces additional variability in the measurements.
One way to bypass the SDN is by giving Pods access to the host's network namespace, with the hostNetwork: true flag in the Pod spec. However, this has security implications, as it could be used to snoop on network activity of other Pods on the same node if the Pod were somehow compromised. Fortunately, we can instead bypass the SDN by using Multus.
Multus is an open source project that enables Kubernetes Pods to attach to multiple networks. It is a Container Networking Interface (CNI) meta-plugin, meaning that it can call other CNI plugins. For bypassing the SDN with MPI Operator worker Pods, we first create an additional network using the following NetworkAttachmentDefinition manifest ‘nad.yaml’:
apiVersion: "k8s.cni.cncf.io/v1"
kind: NetworkAttachmentDefinition
metadata:
name: mpi-network
namespace: default
spec:
config: '{
"cniVersion":"0.3.1",
"type": "macvlan",
"master": "enp1s0f1",
"ipam": {
"type": "whereabouts",
"range": "11.10.0.0/24"
}
}'
In the spec section of nad.yaml, notice the type macvlan, which specifies that the macvlan CNI plugin will be used. This plugin allows Pods to communicate with other Pods on the same and other hosts, using a physical network interface. When a Pod is attached to the macvlan-based network, the plugin creates a sub-interface from the parent interface on the node, and each Pod gets a unique MAC address. In this case, we are specifying the physical interface "enp1s0f1" which is one of the two 25GbE interfaces on the worker nodes. Also, note the spec.ipam section, which specifies how IP addresses are managed on the additional network. In this case, we are using Whereabouts IP address management (IPAM), which is officially a part of OCP as of version 4.5. Whereabouts assigns cluster-unique IP addresses to Pods on the macvlan-based network.
To create the additional network, we simply run
oc create -f nad.yaml
To use the network in a Pod, we add an annotation to its metadata. This also works with MPIJobs, by adding the annotation to the launcher and worker Pods. For example:
apiVersion: kubeflow.org/v1alpha2
kind: MPIJob
...
spec:
mpiReplicaSpecs:
...
Worker:
...
template:
metadata:
annotations:
k8s.v1.cni.cncf.io/networks: mpi-network
...
To verify that the network has been attached to a pod , run oc describe:
$ oc describe pod/multus-test-pod
...
Events:
Type Reason Age From Message
---- ------ ---- ---- -------
...
Normal AddedInterface 56s multus Add net1 [11.10.0.2/24] from mpi-network
...
Running SPECFEM3D_Globe benchmarking
Running SPECFEM3D_Globe on OpenShift requires the help of a Go client, to coordinate the following:
- Parallel execution of the mesher
- Build of the solver, that uses a header file generated by the solver
- Execution of the solver.
The design and implementation of this Go client is described in this blog post.
In the context of this HPC benchmarking work, we wanted to compare SPECFEM performance in multiple platform setups (bare-metal; OpenShift with SDN, Multus or HostNetwork networking), and with multiple problem sizes (ranging from a few minutes of execution to several hours). And as the aim of this work was to demonstrate the scaling of the cluster, we had to run the benchmark with different node counts. In the end, we collected more than 180 measurements.
To automate the execution of this heavy-weight benchmarking, we reused a tool developed as part of another Red Hat project (see its presentation and repository). The tool takes as input a list of parameters to benchmark:
platform: baremetal, podman, openshift
network: default, multus, hostnet
relyOnSharedFS: True
extra:
# 32 nex
- nex=32, processes=1, mpi-slots=1 # 1 machine
- nex=32, processes=4, mpi-slots=2 # 2 machines
- nex=32, processes=4, mpi-slots=1 # 4 machines
# 64 nex
- nex=64, processes=1, mpi-slots=1 # 1 machine
- nex=64, processes=4, mpi-slots=2 # 2 machines
- nex=64, processes=4, mpi-slots=1 # 4 machines
- nex=64, processes=16, mpi-slots=2 # 8 machines
- nex=64, processes=16, mpi-slots=1 # 16 machines
- nex=64, processes=64, mpi-slots=2 # 32 machines
...
With the help of some Python magic, the tool can run SPECFEM OpenShift client or our bare-metal execution script. At the end of the execution, it collects the final execution time from SPECFEM log file, and stores it for offline processing:
[...]
13:32:00 running 67/72
13:32:00 > driver=None_relyOnSharedFS=True_platform=baremetal_network=default_run=scale-3_nex=192_processes=9_mpi-slots=1
13:32:00 apply_settings: relyOnSharedFS=True, platform=baremetal, network=default, run=scale-3, nex=192, processes=9, mpi-slots=1
13:32:00 clear graphs
13:32:00 Waiting for the end of the execution
.............................................
FINISHED: Specfem finished after 9151.703304007999s (=152min)
16:04:45 Timing table has 1 records.
16:04:45 save record into results/openshift/default/baremetal/relyOnSharedFS=True_platform=baremetal_network=default_run=scale-3_nex=192_processes=9_mpi-slots=1.rec
16:04:45
16:04:45 running 68/72
[...]
The goal of this tool is to automatize the benchmark execution and result collection. This avoids repetitive manual interventions that are error-prone, and it also facilitates the execution of long benchmarks that can be carried out overnight or weekends. The tool also provides a plotting framework for visualizing the benchmarks results. We wrote a graph plugin that was used to generate the SPECFEM and GROMACS plots presented in the Results section.
Results
MPI Microbenchmarks
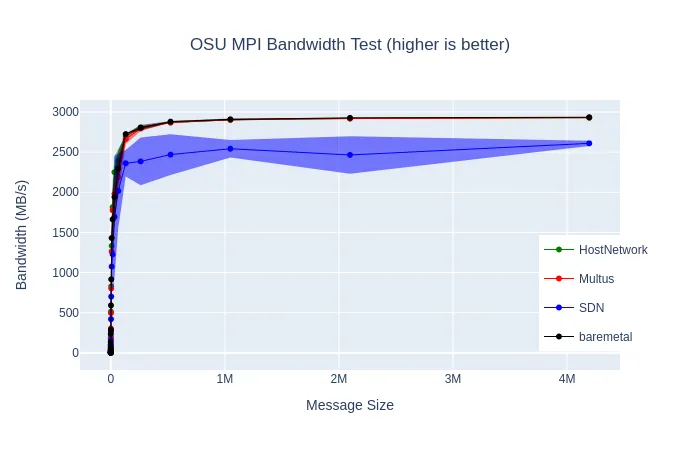
In the previous blog post, we mentioned the significant performance improvement we could get on GROMACS by using hostNetwork: true. As mentioned above, using Multus to create a secondary network on one of the 25GbE interfaces offers a more secure method of bypassing the SDN. We ran MPI microbenchmarks which test peer-to-peer bandwidth and latency at different message sizes to see how the SDN overhead impacts performance, and to verify that our macvlan network using Multus was on par with the hostNetwork results. The average results of testing with many different nodes are shown below:

We also experimented with two microbenchmarks testing the performance of two common MPI collective communications: all-to-all personalized broadcast, and all-reduce
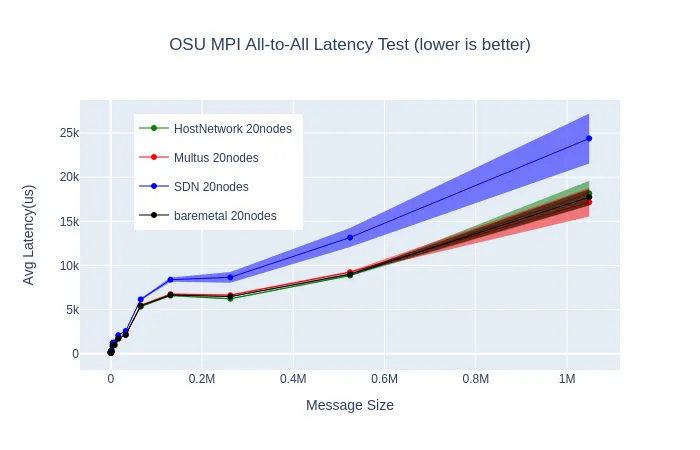
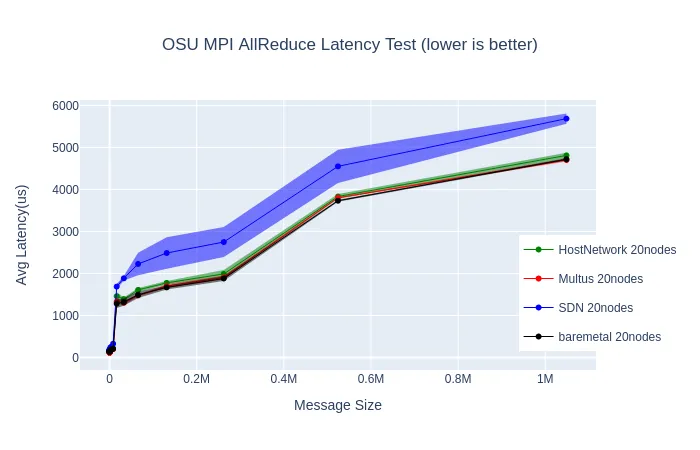
These two sets of microbenchmarks show what we expected to see based on past experiments with GROMACS, as well as past benchmarking of the SDN: the network latency with the SDN can be higher than on bare-metal, especially with larger message sizes.
GROMACS
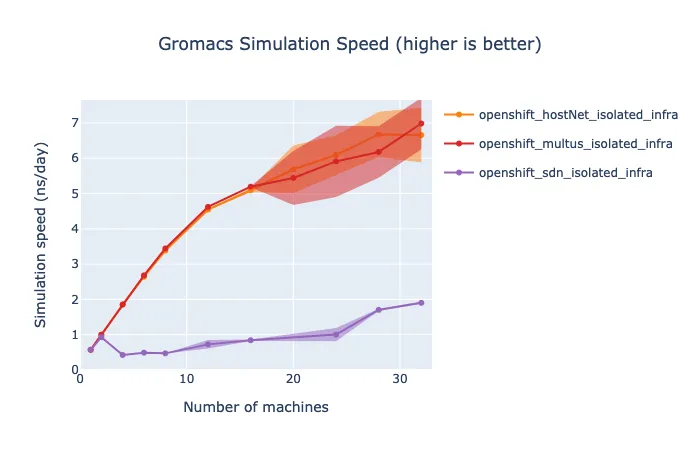
The results for GROMACS are collected from running the "water" benchmark 5 times. We display the average and highlight the range within one standard deviation, to visualize how the performance varies more at higher node counts.
One of the first things we experimented with is isolating infrastructure pods to two specific nodes, to reduce some of the overhead on the worker nodes running the workload. We moved the router pod (ingresscontroller), the image registry, and the monitoring stack (Prometheus, Grafana, AlertManager) to these two infrastructure nodes. As the following graph shows, this reduced variability and improved performance. All of the following results were gathered with infrastructure pods isolated to two specific nodes which were not used for the benchmark run.

As mentioned previously, we can use Multus to bypass the SDN. The difference between GROMACS performance with the default SDN, and using a secondary network or `hostNetwork: true` is very significant. At some node counts, using Multus gives over a 7x improvement in performance.
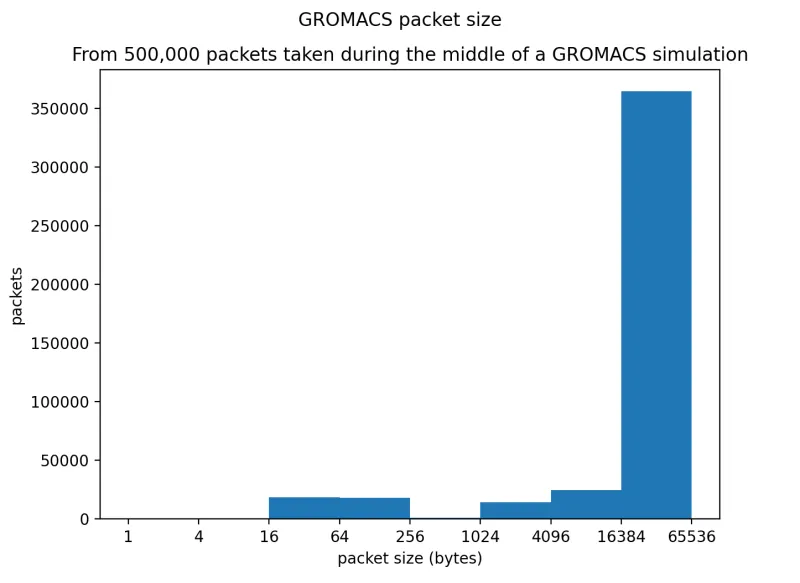
Note that the SDN overhead for GROMACS on this bare-metal cluster is more significant than our initial results on AWS. We have not yet fully determined the reason for this, however, we have gathered some information about the network traffic of multi-node parallel GROMACS test using Pbench. Results from `sar` reveal that our nodes are sending/receiving over 100,000 packets/second, and the number increases as the number of nodes increases.

Furthermore, we examined the size of the packets being transmitted using tcpdump (thanks again to Pbench), and saw that the vast majority of the packets are 64Kb in size. From previous benchmarking done by members of the Performance and Scale team, we know that this type of traffic (Request and Response with large packets) is the most impacted by SDN overhead. As we will show in the following section with the results for SPECFEM, not all workloads are highly impacted.
The main goal of this PoC was to see how the performance of HPC workloads running on OpenShift would compare to bare-metal. The complete set of GROMACS results using the default OpenShift SDN, hostNetwork, Multus, and bare-metal are in the following set of graphs. We show the computation time to simulate one nanosecond, the performance in ns/day simulated, the parallel speedup, and the parallel efficiency.

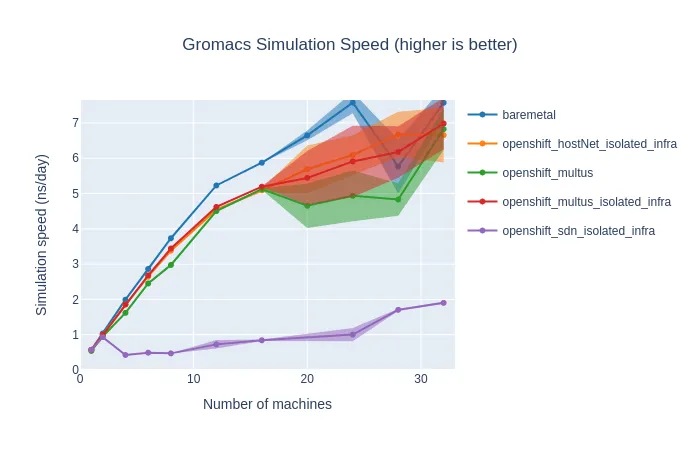
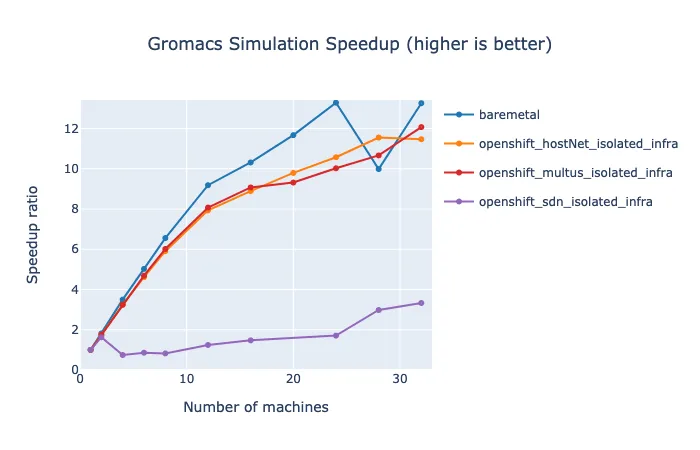

These results show that throughput can be improved significantly by scaling up the nodes. Up to 16 nodes, the performance on OpenShift using the secondary network is within a few percent of the performance on bare-metal. With more than 16 nodes, the performance on both platforms becomes much more variable, but on average the results stay similar, and throughput continues to improve with more nodes. Looking at the simulation time, the number of hours of computation needed to simulate one nanosecond of this simulation does flatten out at about 16 nodes. This aligns with what we have read about running GROMACS on multiple nodes with MPI. To get optimal scaling out of GROMACS, high-speed networking hardware is necessary. Increasing the problem size by doubling the molecules in the simulation results in slightly better scaling, not flattening out until about 20 nodes.

SPECFEM3D_Globe
For the second HPC workload, we ran Specfem3D_Globe with the default model. Let us describe how we configured the benchmark parameters:
Problem size (NEX): we used the "number of elements at the surface along the two sides of the first chunk" (NEX_XI and NEX_ETA values) to control the size of the problem solved during the simulation. NEX_XI and NEX_ETA were kept identical, with values 64, 128, 192 and 256. These problems took between a few minutes and 3.5 hours to solve.
Number of processes: the number of processes (controlled by NPROC_XI x NPROC_ETA) that can be used to run Specfem depends on the NEX value. More exactly, "NEX must be multiple of 16 and 8 x multiple of NPROC". In this benchmark, we kept NPROC_XI and NPROC_ETA equal, and we used 1, 2, 4, 16, 32, 36 or 64 processes for the different NEX problem sizes.
Number of machines, process per machine and threads: Specfem is able to efficiently exploit shared-memory cores with the help of OpenMP threads. We chose to use one or two processes per machine (OpenMPI slots parameter), with either four threads (if one process) or two threads (if two processes) so that each of the node's physical cores runs one-and-only-one thread.
Note that by default, OpenMPI binds each process it spawns to a single CPU core, which prevents any speedup when using multiple threads. We passed the -bind-to none option to mpirun to prevent this CPU pinning.
Strong scaling: running SPECFEM3D_Globe with 128 NEX
The results below present Specfem benchmarks with a fixed problem size (128 NEX), running on 4 to 32 processes.
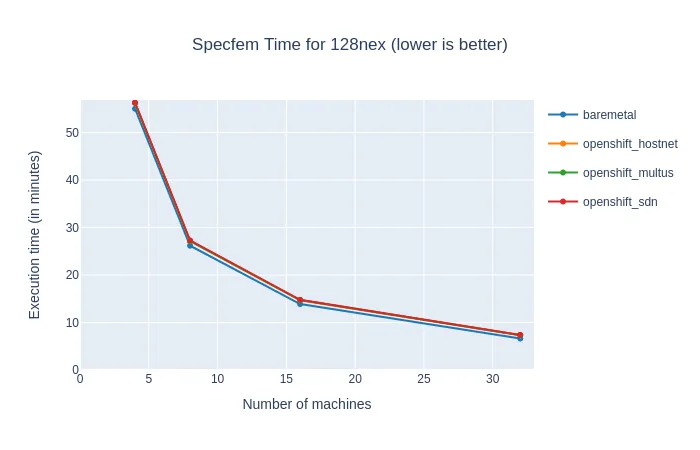

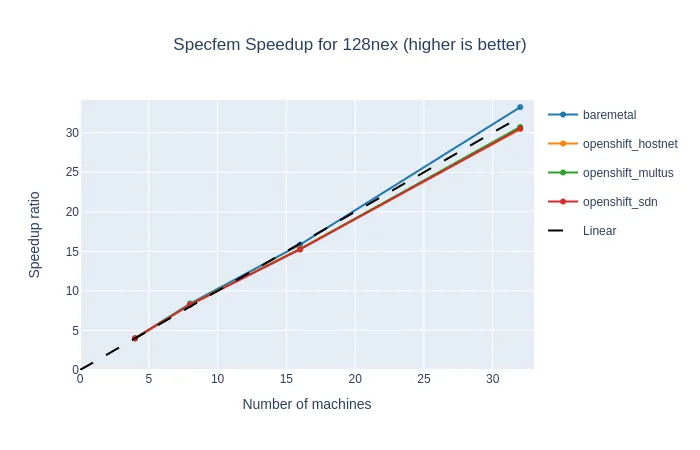
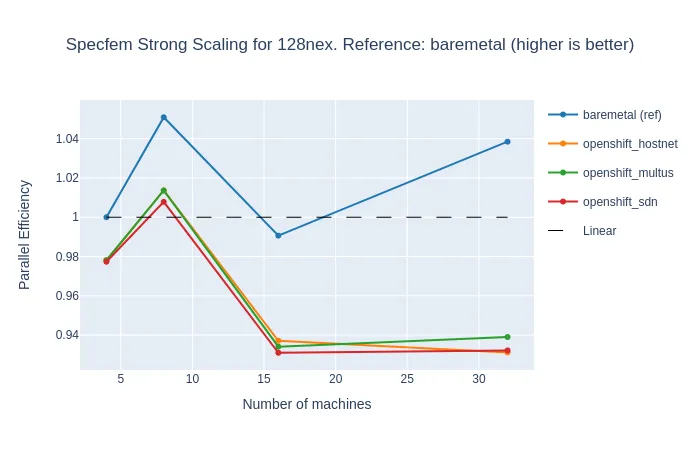
This problem took 55 minutes to execute on four machines, and only 8 minutes on 32 machines (see the time graph). For four machines, the slowdown of OpenShift was only 2%, and it grew up to 12% when OpenShift overhead took over the extra computing power on 32 nodes (see the comparison graph). But on the strong scaling graph, we can see that the efficiency of OpenShift remained very good, not far below the bare-metal reference and the linear time.
We can also note that Specfem performance is virtually independent of the network types.
Weak Scaling: Running SPECFEM3D_Globe with multiple problem sizes
The graphs below present the results of Specfem benchmark with multiple problem sizes (64 to 256 NEX), running on 4 to 32 processes.
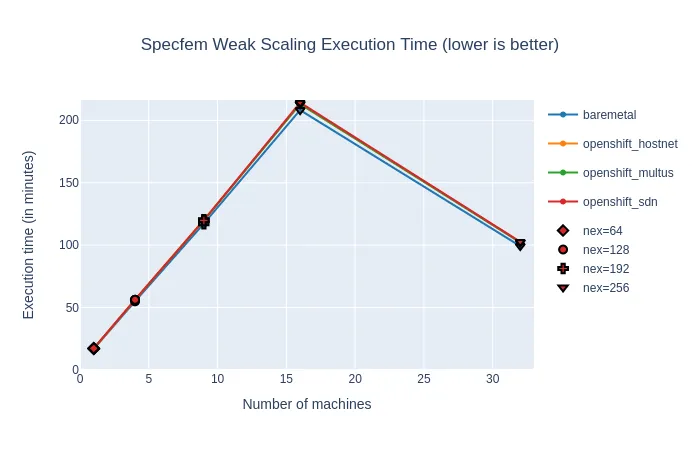


We can see that when we feed bigger problems to the cluster, we get back very close to the bare-metal reference, with less than 3.5% of overhead for most of the runs. For problems big enough (192 NEX and more), this applies up to 32 nodes, including the super-linear efficiency.
Conclusions
Overall our tests suggest that when running these high-performance scientific workloads on OpenShift, there is very low CPU overhead relative to bare-metal, as we have come to expect from containers. Additionally, when using Multus to enable a secondary network, there is very little impact on the network performance. By isolating infrastructure pods to specific nodes, we were also able to decrease variability and slightly increase the average performance of our workloads. Because we saw low overhead up to 32 nodes we are hopeful that workloads like these would continue to scale well to higher node counts. In this PoC testing, we were able to get performance within a few percent of bare-metal with two scientific HPC workloads while taking advantage of some of the benefits of containers and OpenShift.
We believe that Linux containers and container orchestration engines, most notably Kubernetes, are well positioned to power future software applications spanning multiple industries. Red Hat has embarked on a mission to enable some of the most critical workloads like machine learning, deep learning, artificial intelligence, big data analytics, high-performance computing, and telecommunications, on Red Hat OpenShift. By developing the necessary performance and latency sensitive application platform features of OpenShift, the PSAP team is supporting this mission across multiple footprints (public, private and hybrid cloud), industries and application types.
About the authors

David Gray is a Senior Software Engineer at Red Hat on the Performance and Scale for AI Platforms team. His role involves analyzing and improving AI model inference performance on Red Hat OpenShift and Kubernetes. David is actively engaged in performance experimentation and analysis of running large language models in hybrid cloud environments. His previous work includes the development of Kubernetes operators for kernel tuning and specialized hardware driver enablement on immutable operating systems.
David has presented at conferences such as NVIDIA GTC, OpenShift Commons Gathering and SuperComputing conferences. His professional interests include AI/ML, data science, performance engineering, algorithms and scientific computing.

Kevin Pouget is a Principal Software Engineer at Red Hat on the Performance and Scale for AI Platforms team. His daily work involves designing and running scale tests with hundreds of users, and analysing and troubleshooting how the test enrolled. He has a PhD from the University of Grenoble, France, where he studied interactive debugging of many-core embedded system. Since then, he enjoyed working on different topics around reproducible testing and benchmarking, and finding ways to better understand software execution.
More like this
Looking ahead to 2026: Red Hat’s view across the hybrid cloud
Red Hat to acquire Chatterbox Labs: Frequently Asked Questions
Crack the Cloud_Open | Command Line Heroes
Edge computing covered and diced | Technically Speaking
Browse by channel

Automation
The latest on IT automation for tech, teams, and environments

Artificial intelligence
Updates on the platforms that free customers to run AI workloads anywhere

Open hybrid cloud
Explore how we build a more flexible future with hybrid cloud

Security
The latest on how we reduce risks across environments and technologies

Edge computing
Updates on the platforms that simplify operations at the edge

Infrastructure
The latest on the world’s leading enterprise Linux platform

Applications
Inside our solutions to the toughest application challenges
Virtualization
The future of enterprise virtualization for your workloads on-premise or across clouds