
Red Hat OpenShift on AWS, commonly known as ROSA, is a fully managed enterprise-ready Kubernetes platform jointly engineered and supported by Red Hat and AWS. As a managed service, ROSA reduces complexity for IT teams that build and manage their own application platforms. Consequently, ROSA empowers developers to focus on what they know best—writing quality code—which leads to faster deployment and increased productivity.
[ See Kubernetes: Everything you need to know ]
In this article, I will walk you through a ROSA cluster's simplest and default architecture and briefly explain the components and functions of the different cluster resources. The article summarizes my video covering the same topic, which you can watch below.
Get started with ROSA
Getting started with ROSA is easy. It runs natively on AWS infrastructure and uses the high availability and resiliency of the AWS cloud.
To create a public ROSA cluster in a single Availability Zone, use the command:
$ rosa create cluster --cluster-name=<cluster-name>
This default deployment creates a Virtual Private Cloud (VPC) with two subnets—one public and one private—within the same Availability Zone (a distinct physical location within an AWS region). A VPC is a logically isolated section of the AWS public cloud, and subnets are smaller segments of the VPC.
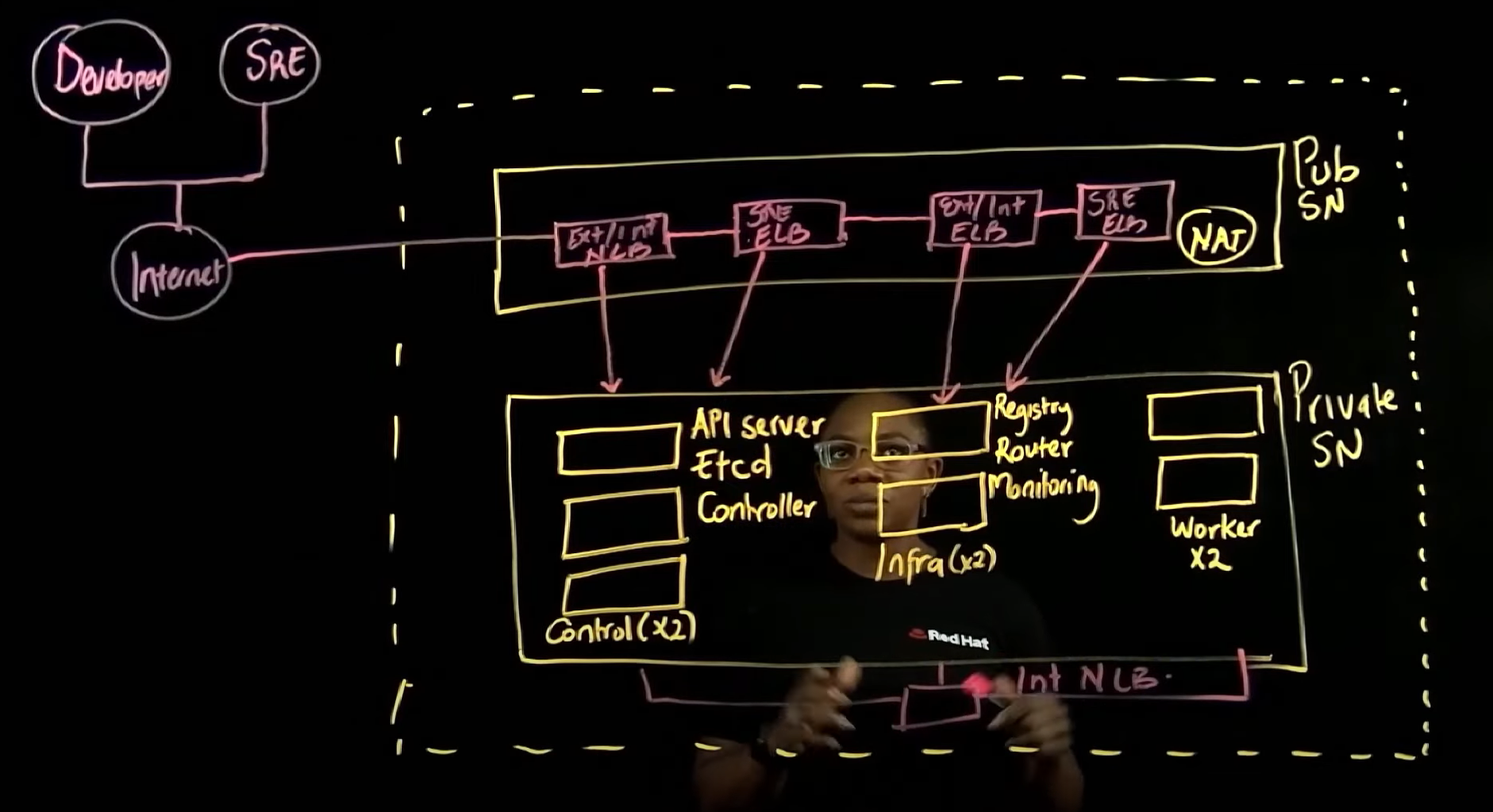
Each cluster gets deployed with three control plane nodes, a minimum of two infrastructure nodes, and at least two worker nodes inside the private subnet.
Each control plane node consists of three elements: an API server, an etcd database, and controllers. The control plane manages the entire cluster.
The infrastructure nodes each contain a built-in OpenShift container registry, router layer, and monitoring layer. The presence of at least two infrastructure nodes ensures the resiliency of the OpenShift router layer.
The worker or "compute" nodes contain agent runtimes for pod networking, monitoring, and DNS resolution. Application workloads run on the worker nodes.
The private subnet uses a network address translation (NAT) gateway that resides in the public subnet to access the internet.
[ When you're ready, start building in the Red Hat Hybrid Cloud Console. ]
The ROSA installer also deploys a series of AWS load balancers in the public subnet, allowing access to the cluster resources in the private subnet. The first load balancer is known as the external/internal API network load balancer (NLB), and it allows access to the control plane nodes through Kubernetes API.
The second load balancer is an external/internal API Elastic Load Balancer (ELB), and it allows access to end-user applications. This load balancer sits in front of the OpenShift HAProxy and routes requests to the application pods.
Manage the cluster
The Red Hat Site Reliability Engineering (SRE) team gets access to the cluster through the SRE API ELB for cluster administration and management. The SRE team also uses the Red Hat SRE Console ELB to manage the cluster.
The control plane nodes, infrastructure nodes, and worker nodes communicate with each other through an internal API NLB.
This default deployment is the simplest way for a new user or developer to begin understanding ROSA. Single Availability Zone deployments are not recommended for scale, resilience, or production.
Wrap up
The architecture of OpenShift on AWS (ROSA) is robust, but perhaps most importantly, it is architecture you don't have to build yourself. ROSA is a cloud service running on AWS cloud that's ready for your services. Understanding that architecture, in turn, gives you the power and confidence to adjust it if and when it's necessary.
For more detail on ROSA and its components, please watch this YouTube video.
[ Learn how to build a flexible foundation for your organization. Download An architect's guide to multicloud infrastructure. ]
About the author
Charlotte is a Manage OpenShift Black Belt focusing on Red Hat Managed OpenShift offerings on AWS, Microsoft Azure and other public clouds. Charlotte has several years of IT experience helping customers build resilient, highly-available and cost-optimized solutions in the cloud. In her current role, Charlotte is focused on removing organizational, technical and competitive blockers of customer’s adoption of Managed OpenShift as a preferred platform for application workload deployments. Charlotte enjoys providing business value as well as having technical deep dive conversations with customers.
More like this
4 reasons to start using image mode for Red Hat Enterprise Linux right now
The agentic paradox and the case for hybrid AI
Crack the Cloud_Open | Command Line Heroes
Can Kubernetes Help People Find Love? | Compiler
Browse by channel

Automation
The latest on IT automation for tech, teams, and environments

Artificial intelligence
Updates on the platforms that free customers to run AI workloads anywhere

Open hybrid cloud
Explore how we build a more flexible future with hybrid cloud

Security
The latest on how we reduce risks across environments and technologies

Edge computing
Updates on the platforms that simplify operations at the edge

Infrastructure
The latest on the world’s leading enterprise Linux platform

Applications
Inside our solutions to the toughest application challenges
Virtualization
The future of enterprise virtualization for your workloads on-premise or across clouds